PARSLEE – THE OPEN SOURCE ROVER WITH RASPBERRY SHAKE ON-BOARD
14 May, 2019 – Written by Dr. Jamie Molaro

By day, I am a Research Scientist at the Planetary Science Institute, in affiliation with (and working physically from) the Caltech/Jet Propulsion Laboratory in southern California. I am also a Participating Scientist on NASA’s OSIRIS-REx mission to retrieve a sample from asteroid Bennu, and a member of the Project for Exploration Science Pathfinder Research for Enhancing Solar System Observations (Project ESPRESSO), a node of NASA’s Solar System Exploration Research Virtual Institute (SSERVI).
I study the surfaces of rocky and icy airless bodies, like Earth’s Moon, asteroids, comets, and the icy moons of Jupiter and Saturn. My research primarily focuses on the ways in which rocks, boulders, and soils evolve through different weathering processes, and what this tells us about their surface characteristics, their history, and the evolution of their landscapes.
Outside of work, I enjoy spending my time making things and pursuing other creative activities. I create science and data-driven artwork in paper, embroidery, and other mediums, as well as play the harp and run a D&D group. I also spend time playing board and video games and doing word puzzles with my husband, Ian Reasor. He’s a software engineer at Adobe, but in his spare time really enjoys working with his hands, climbing, doing crosswords, and gaming.
WE DECIDED TO BUILD A ROVER!
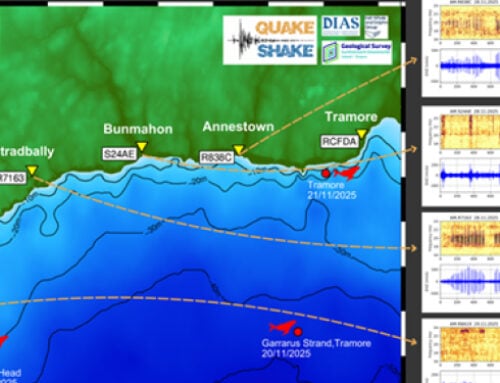
We had been looking for a project to work on together last year when the Caltech/Jet Propulsion Laboratory (JPL) put out plans for the Open Source Rover (OSR), a mini version of the Mars Curiosity rover -> Check them out! JPL is a research lab funded through NASA, but managed through a contract by Caltech. It’s the place where many of NASA’s robotic spacecrafts, such as rovers and orbiters, are built and monitored.


Images of the mini rover. Credit NASA-JPL
I work physically from JPL as a contractor, though I should say that my opinions and statements made here are my own and not those of either JPL or NASA.
For obvious reasons then, I am a huge nerd for space robots and we thought it would be really fun not only to build the rover, but to bring it with us camping, to maker faires, and other places. I end up doing a lot of science outreach activities, and who wouldn’t love getting to drive a ‘lil rover! Maybe I’ll even do some field research with it eventually. I guess building a rover also seemed like a very timely project. Last year Mars had a giant dust storm that forced all of our active surface rovers to hunker down. Unfortunately, one of the rovers did not wake back up. NASA officially declared the mission of Opportunity, one of the Mars Exploration Rovers, to be complete. Opportunity was a fantastic little rover – its nominal mission duration was only 90 days, but it lasted for ~15 years. Talk about a well-built machine, and a rover that stole our very hearts.
While I have a lot of craft robots, I’ve never actually built a robot before. The build involves all elements of STEM including fabrication/machining, electronics work, and some basic software programming, so it has definitely been a good project for learning new skills. Ian and I are both creative in different ways, and our overlapping but separate skill sets have made for a very complementary partnership for this kind of project. The OSR is well designed, and the instructions are very detailed and thorough. The developers tried to keep the costs down to enable school groups, maker spaces, and other interested folks to build their own. There is also an active forum where builders can discuss problems, modifications, and other rover topics. The OSR developers are also very engaged on the forum, and working with the community have made upgrades and improvements to the plan since we’ve started building. These get incorporated into the Git repository and the build instructions for new builders. Overall, it’s a very fun, welcoming, and active community!
Planetary scientists and NASA in general love to use acronyms for everything, so we decided right away the rover needed a good name. We have named it PARSLEE, for Planetary Analog Remote Sensor and ‘Lil Electronic Explorer. The name may require some explanation- planetary analogs or analog environments are Earth environments that can be thought of as analogous to other planets, providing testing grounds for research and technology development. And remote sensing is a term we use to refer to the ways in which we can remotely explore an environment using a robot spacecraft or satellite.
PREPARATION
First, we ordered all the things on the parts list. Despite the long list, the process went very smoothly because links are provided to all the items necessary, along with details of prices and quantities required. The online guide even has a “cart share” facility linking to a saved list of the parts required from a handful of suppliers.
Over the next few weeks packages started coming in, and once it had all arrived we spent an evening sorting and labeling all the parts. The instructions refer to things by numbers (S22, B7, etc) and there are a lot of pieces, so it really pays to be organized!




Organizing the many mini rover parts
We found as the build progressed that some modifications to the plans were developed by the community in response to things like part availability and performance. At this point, we have bought several items that we now no longer need but we didn’t lose a ton of money on this and we’ll eventually find a use for them. We still felt it was easier to buy everything we needed at once to make the build progress as smoothly as possible.
BUILDING BEGINS!
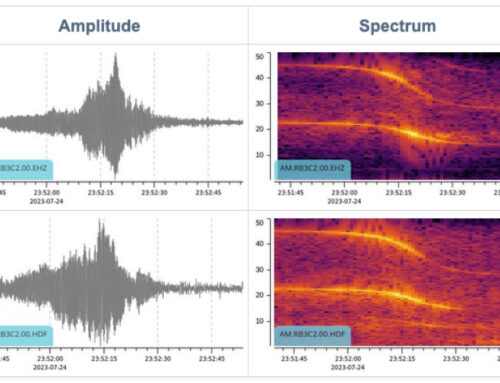
The instructions breakdown the building process into different stages:

An example roadmap of how you can build the rover. Credit NASA-JPL
With all the parts to hand we were ready for stage 2. The different sections of the rover body can be built separately and then put together in stage 3.
We started by building the rover wheel assembly which came together pretty easily, then moved on to the head assembly, and the main body itself.




Building the wheel assembly
We had been holding out on working on the electronics while the rover developers tested a new Printed Circuit Board (PCB) that will simplify a lot of the wiring. This is nearly complete, and should make the build faster and the rover more robust. It did mean we had to postpone finishing the main body until the PCB was ready, so we have a few loose ends to tie up.
Meanwhile, we hopped over to working on the differential pivot. This involved drilling holes in an aluminum pipe, which was a little tricky and they didn’t come out perfectly straight. The differential pivot is part of the rover’s steering system. For now it is difficult to tell if the crooked holes will affect its performance until we integrate all the parts together. The builder community has since developed a 3D printed part to avoid this issue, but for now we decided to leave it as it is and move forward. This type of thing has been one of the most interesting, though at times frustrating, parts of working on an evolving set of plans. It’s something you can choose to build “out of the box,” but if you want to take the time to keep up with what’s happening in the forum some parts of the build might turn out to be easier or more robust.




Working on the head assembly, main body and differential pivot
At this point in the project, we have also already done several things wrong and fixed them, but this is part of the fun of trial and error and learning new things! And as I have mentioned, everyone in the forum is friendly and willing to help out if you need to hop on and ask for advice.
Building the rocker bogie joints was next and ended up taking most of a weekend to complete, proving to be the trickiest part to put together so far. There are some minor errors in the instructions that made it a little difficult, but mostly it just involved some trial and error to get through.









Building the rocker bogie joints
There are a lot of small parts you have to hold together at the same time while you screw them in. We found in some cases it was best to do this alone, in others we worked together on the same part.
The pattern of holes on the aluminum pieces is cleverly done so that all the parts can be screwed together at 45 or 90 degree angles, but more than once we put something on at the wrong 45 degree angle and had to redo it. This seems like a mistake you should only have to do once to learn, but that turned out not to be true for us, which resulted in both frustration and hilarity throughout the weekend. I think this is all just part of the process of learning to use new types of materials and tools – making mistakes is easy to do, but thankfully they are also easy to fix. We also finally figured out that some of the CAD images in the instructions were mirror images of what they should have been. We eventually decided to build both rocker bogie joints in parallel so that we could double check each other and not have to figure out the instructions more than once. This proved to be a very constructive and collaborative technique for us!
We have now built most of the rover’s separate sections but before they are ready to integrate we need to work on the electronics. Once this is complete, it should really start looking like a rover! You’ll have to wait for another update here to see the finished rover, or you can watch my website or check twitter (@spacejammie) using the hashtags #PARSLEE and #roverbuild.
JUMPING STRAIGHT TO THE UPGRADES!
We bought instruments!
I know it’s a little early to be thinking about a payload for a rover that hasn’t been finished yet, but I just couldn’t help myself. We know that we want weather instruments, a camera, and a seismometer. These are the kinds of instruments we use on real rovers and other spacecrafts to explore and learn about other planets. They tell us what the environment is like, what’s it’s made of, what kinds of processes are active at the surface, what the subsurface is like- most people are familiar with seeing images of other planets by now, but there is so so so much more you can learn using other types of data!
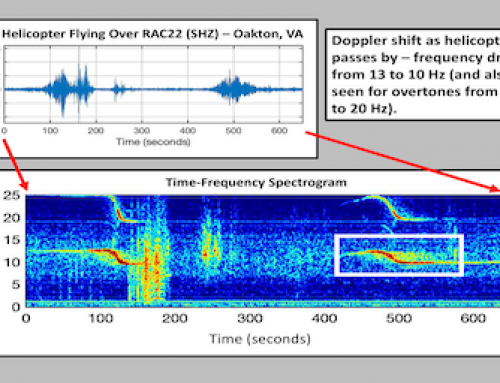
For the weather data, we didn’t want to have to build a whole custom, heavy data logger system so we bought a portable Kestrel 5000. I have a 3500 model I carry with me all over the place which I absolutely love. A friend of mine dubbed it the Nerdomometer, which I also love. It measures temperature, pressure, elevation, wind speed, and humidity. They are convenient because they’re extremely well built, rugged for outdoor environments, and really lightweight (the rover can only carry so much!). It has a screen, but this new nerdometer can also communicate to a remote device via bluetooth or wifi. For now, we are just viewing it via the Kestrel app on an Android tablet. You can view the measurements in real time through the app, though not a time-series plot of said measurements like I’d hoped. It was also disappointing that writing the data to a file can only be done via email, but it can store quite a bit locally before you need to empty it. We eventually want to write our own software for the rover’s Raspberry Pi to collect, real-time display, and store this data, but we will leave upgrades till later once the rover is finished.

The Kestrel 5000 and GoPro camera
For the camera we went with a GoPro. There are cheaper solutions out there, but one of the places we like to camp and plan to bring PARSLEE is an ancient, dry lake bed. Playas often have extremely fine dust that can get into and destroy anything, and we just don’t expect a webcam to last out there. We are already thinking about about how we can protect the rover’s electronics from the dust. One of the major downsides to the GoPro is that we likely won’t have the option of writing our own software to display a feed, but getting a camera that would survive was our first priority- this is another thing we will explore more options for down the road.
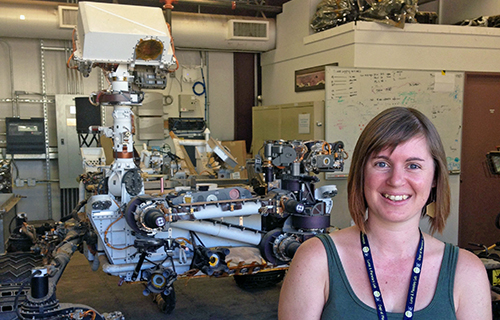
Finally for the seismometer we got the Raspberry Shake. There are a few versions you can choose from. They also have an infrasound monitor, but we decided the current payload is enough for now. We got the RS4D which incorporates a geophone and 3 accelerometers, and runs on its own Raspberry Pi. Like the other two instruments, we’ll power it directly from the battery and send the data to a tablet where we can view it live. There are a few different ways that you can access the Shake’s data. The easiest so far has been just through RaspberryShake.org’s ShakeNet, but when we’re out in the field we won’t have internet so we’re looking into other options too.



The Raspberry Shake 4D and real-time activity feed on ShakeNet
TO INFINITY AND BEYOND?
When PARSLEE is complete we are looking forward to taking it on a few missions:
Outreach Programs
Projects like this are really great for science outreach. Bring a mini rover to an event and kids are guaranteed to get excited! I also focus on doing outreach in other under-targeted communities, mostly through art. I both make and organize exhibitions for planetary science/astronomy related and data-driven artwork and we would like to use PARSLEE as a kind of interactive art experience.
We want to use it to enable people to experience how it is that we can explore other worlds through remote sensing. When most people think of space exploration they think of sending humans places or taking images with a Mars rover. But you don’t have to see something to explore it, and an instrument like a seismometer helps us understand our physical environment in a whole different way. By having multiple instruments onboard for people to use and explore their own environment, we hope it will give a more personal and real understanding of space and scientific exploration.
Engaging The Maker Community
On a more practical side, when we send rovers to other worlds the camera is often a really important tool. On Mars, the rover operations team sends instructions telling the rover where to drive. When it arrives, they look at the images it sends back, the science team decides what kinds of measurements or data they want to take, and then it is sent off to drive to a new location. This type of stop-and-go exploration works fine in some places, but there are some space missions in development that are planning to explore really challenging terrains or in which the mission lifetime is extremely short. One of my favorites is Moondiver, which plans to explore lava tube caves on the Moon. I’m not involved in this mission, but it got me thinking about how we could use PARSLEE to help us develop new ways of exploring. For these kinds of missions, navigation can be really hard due to the time delay in sending/receiving data to/from a rover. We’d like to engage the maker community in developing some technologies that facilitate more flexible and rapid navigation in pseudo-real-time, and plan to use the rover as a practical tool for testing them. We also have some other projects brewing around accessibility issues, and using rovers as a way for scientists who can’t physically get out into the field to participate in field research.
Research
Finally, on the research side, I do plan to use the Raspberry Shake for some experiments. One of my main areas of research is on mechanical weathering processes on other worlds. Stresses induced in rocks from heating and cooling can cause fracturing and breakdown of rock into dust. We think this is really important on asteroids, but also on the Moon and Mars. In some places, the signature of this on the surface is really clear, but on the Moon it’s hard to see because there are other weathering processes happening at the same time.
One of my collaborators, Dr. Renee Weber from Marshall Spaceflight Center, has analyzed the geophone data from the Apollo 17 landing site and discovered that there are thermally driven shallow moonquakes that happen every (lunar) day. We think these quakes may reflect the signals either from a thermal fracturing process or from soil/boulder shifting and settling due to thermal creep. Dr. Weber is on the Mars InSight team, so they’ll be looking for similar quakes on Mars. With this in mind we’d like to do some experiments heating and cooling boulders and soils in the lab and in the field, and analyzing their seismic signature. We don’t have funding for these experiments yet, but we’ll hopefully be able to do some preliminary analysis in order to write a grant proposal for it. For this work we’ll likely use the Shake both on and separate from the rover.
At Raspberry Shake we would like to say a huge thank you to Dr. Jamie Molaro for sharing details of her fantastic project. We are really looking forward to seeing the finished rover and PARSLEE in action on its first missions.